|
|

|

|
| e-Pub |
Section: New Results
Automatic Tracker Selection and Parameter Tuning for Multi-object Tracking
Participants : Duc Phu Chau, Slawomir Bak, François Brémond, Monique Thonnat.
Keywords: object tracking, machine learning, tracker selection, parameter tuning
Many approaches have been proposed to track mobile objects in a scene [87] , [45] . However the quality of tracking algorithms always depends on video content such as the crowded level or lighting condition. The selection of a tracking algorithm for an unknown scene becomes a hard task. Even when the tracker has already been determined, there are still some issues (e.g. the determination of the best parameter values or the online estimation of the tracking reliability) for adapting online this tracker to the video content variation. In order to overcome these limitations, we propose the two following approaches.
The main idea of the first approach is to learn offline how to tune the tracker parameters to cope with the tracking context variations. The tracking context of a video sequence is defined as a set of six features: density of mobile objects, their occlusion level, their contrast with regard to the surrounding background, their contrast variance, their 2D area and their 2D area variance. In an offline phase, training video sequences are classified by clustering their contextual features. Each context cluster is then associated to satisfactory tracking parameters using tracking annotation associated to training videos. In the online control phase, once a context change is detected, the tracking parameters are tuned using the learned parameter values. This work has been published in [30] .
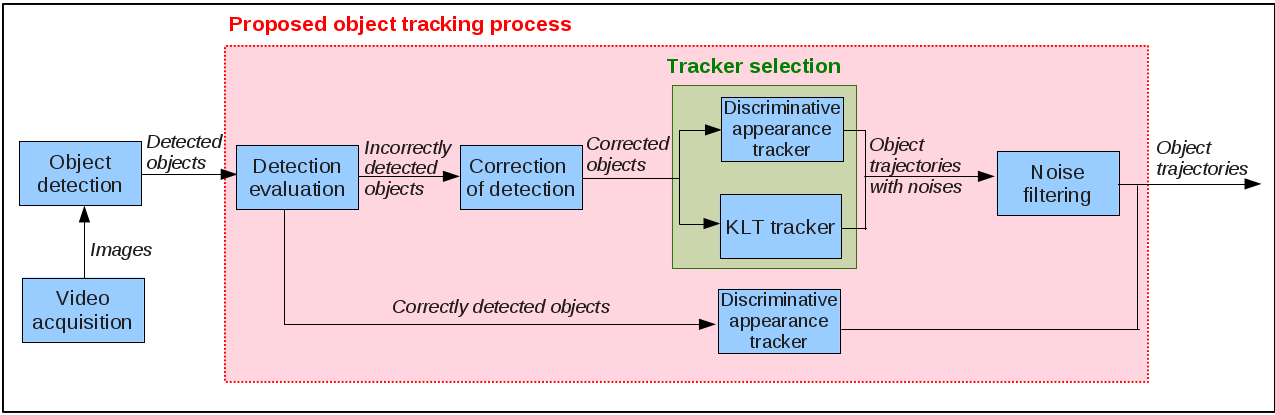
A limitation of the first approach is the need of annotated data for training. Therefore we have proposed a second approach without training data. In this approach, the proposed strategy combines an appearance tracker and a KLT tracker for each mobile object to obtain the best tracking performance (see figure 19 ). This helps to better adapt the tracking process to the spatial distribution of objects. Also, while the appearance-based tracker considers the object appearance, the KLT tracker takes into account the optical flow of pixels and their spatial neighbours. Therefore these two trackers can improve alternately the tracking performance.
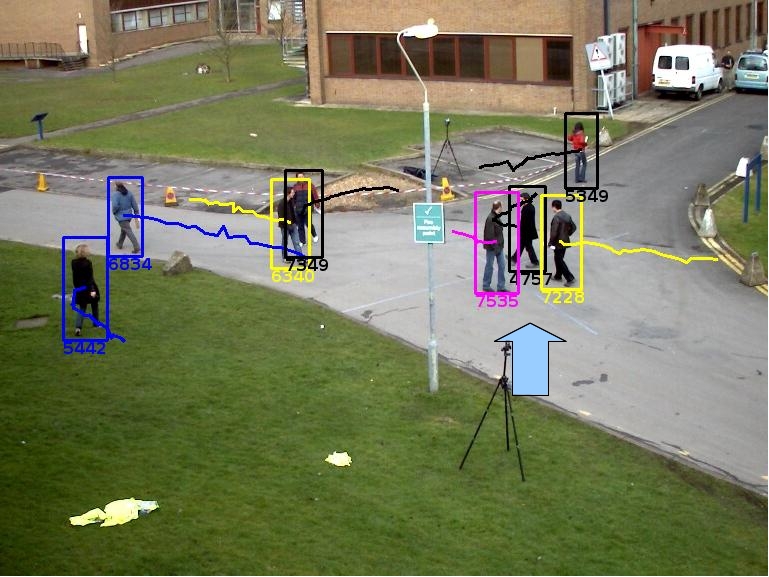
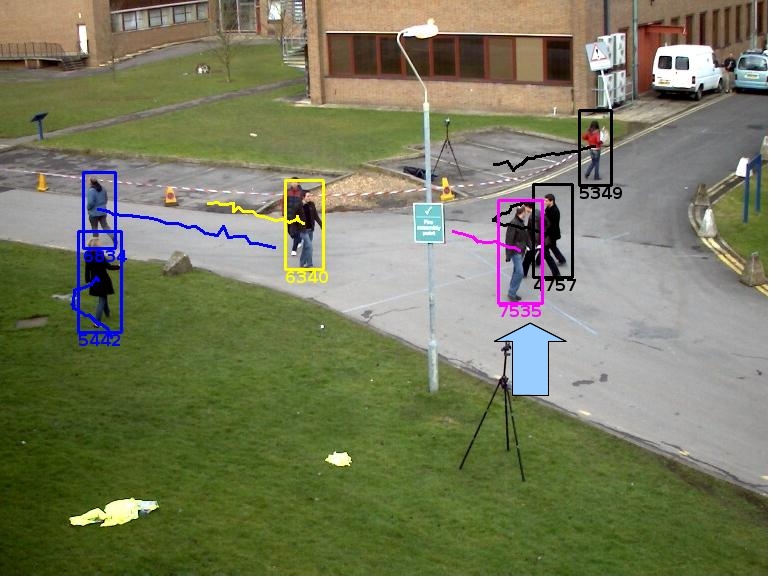
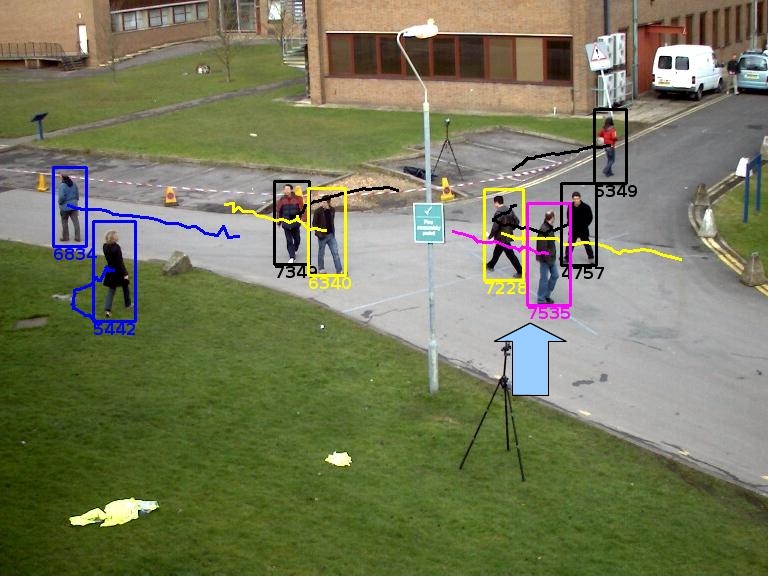
The second approach has been experimented on three public video datasets. Figure 20 presents correct tracking results of this approach even with strong object occlusion in PETS 2009 dataset. Table 2 presents the evaluation results of the proposed approach, the KLT tracker, the appearance tracker and different trackers from the state of the art. While using separately the KLT tracker or the appearance tracker, the performance is lower than other approaches from the state of the art. The proposed approach by combining these two trackers improves significantly the tracking performance and obtains the best values for both metrics. This work has been published in [39] .